

유선철 교수, 포스텍 연구팀, 수중 로봇 플랫폼 ‘히어로-블루’ 개발
페이지 정보
2024.04.15 / 23관련링크
본문
 | ||
| ▲ 수중 로봇 플랫폼 '히어로-블루'가 물속에서 걷고 있다. | ||
포스텍 유선철 교수팀이 수중 로봇 플랫폼인 ‘히어로-블루’(HERO-BLUE·Hazardous and Extreme environment RObot for Biomimetic multilocomotion-based Underwater Expedition)를 개발했다.
연구팀은 학술 전문지인 ‘IEEE Transactions on Robotics’에 히어로-블루에 대한 연구 성과를 발표했다.(논문 제목:Development of Bioinspired Multimodal Underwater Robot “HERO-BLUE” for Walking, Swimming, and Crawling)
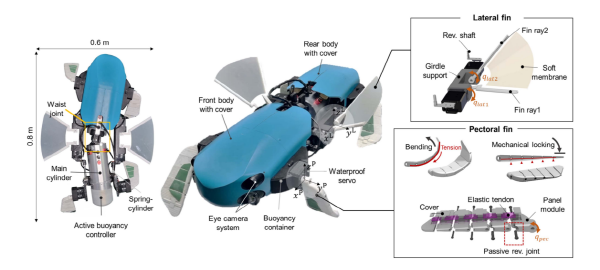 | ||
| ▲ 히어로-블루의 하드웨어 구성 | ||
히어로-블루는 유영 동작과 다리 동작을 결합한 하이브리드 형태의 수중 로봇으로, 물속에서 유영, 기어다니기, 걷기 등 이동 동작이 가능하다. 히어로-블루에는 유영용 지느러미(fin)와 보행용 다리 기능을 수행하는 다중 모드 핀이 장착되어 있다. 다중 모드 핀은 단일의 로봇시스템에 척추 부분과 부드럽게 움직이는 핀을 통합해 유영, 기어다니기, 걷기 등 3가지 이동 모드를 지원한다.
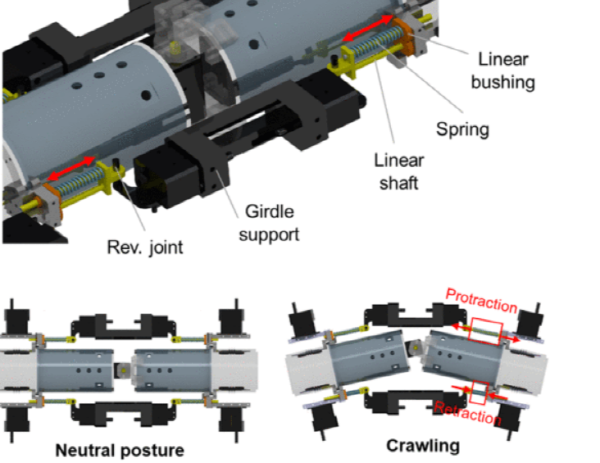 | ||
| ▲ 척추 구조와 운동 메카니즘 | ||
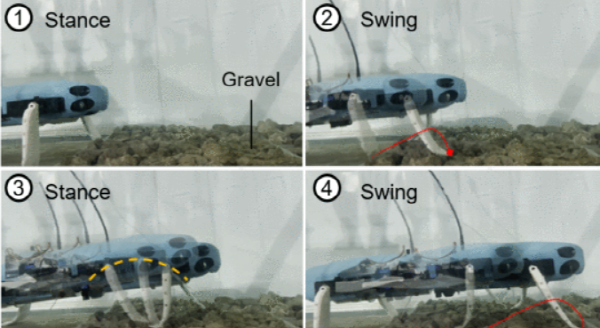 | ||
| ▲ 히어로-블루의 수중 걷기 동작 | ||
 | ||
| ▲ 바다, 호수 등 다양한 환경에서 필드 테스트를 진행하는 모습 | ||
연구팀은 수조 실험과 현장 실험에서 수중로봇의 추력과 유영 시험을 통해 유영 능력을 검증했으며 자갈, 흐르는 물, 경사면 등 세 가지 환경에서 다리 운동 능력을 정량적으로 검증했다고 밝혔다.
또한 하이브리드 동작을 달성하기 위한 수학적 모델, 동작 계획 방법론 및 제어 전략을 테스트했다. 연구팀은 향후 이 로봇 플랫폼이 임무 중 유연한 동작을 필요로 하는 다양한 수중 응용 분야에 적용될 수 있을 것으로 기대하고 있다.
출처: 로봇신문